Update 2/19/2019:
Scroll to the end of the post...
We all dream of using those powerful industrial linear servomotors we keep seeing around being used on 6dof motion platforms. Their prices are dropping and are getting more and more wide available. But they can be hard to use as they do not provide any easy way of reading the position feedback from them...
Some of the solutions the past years for adding position sensors to the control loop needed for the AMC1280USB included Linear Potentiometers or String potentiometers. The linear potentiometers a great stable solution that can be placed in parallel to the actuator but may cost too much at times with prices range from $90 to $300 depending on the length they can extent! The String Potentiometers on the other hand, although are in the same cost range as the linear ones, you can easily make your own using inexpensive 10-turn or 5-turn potentiometers and 3dprint your own case for it.
After many requests I indulged to create my own solution of reading instead the actual servomotor encoder signals (quadrature pulses) and convert them to normal analog 0-5v position signal that the AMC1280USB can read easily. The culprit is that Encoder2Position it needs more than just reading the quadradure signals as they only provide reference information. It needs to know the limits of the actuator to now where is the low position of the rod (fully retracted) and the high position of the rod (fully extended) to be able to assign correctly the 0-5v output to the full stroke of the actuator. This is done using magnetic reed switches attached on the actuator cylinder that inform the Encoder2Position module that the actuator reached low or high position and it can set these readings of the quadrature signal counter to 0% or 100%. Some automatic calibration is also needed during power up so the Encoder2Position can get familial with the actuator that is attached to. This allows the use of the Encoder2Position module to any length of actuator or type of encoder that the servomotor may have (from 32 CPR to 2500CPR).
After a few iterations of the Encoder2position module board, I made some tests on actual linear servomotor set that was lent to me by a customer.


That unit included brake function which I didn't activate properly on my first videos so excuse any loud screeching noises you may hear... In the first two videos I do some manual movement of actuator, to observe the counter values of the quadrature encoder of the servomotor, displayed on a small OLED attached on the Encoder2Position.
Manual testing at 25% speed
PID loop motion testing at 75% speed
More servomotor testing... wiring fixed and all functions enabled
Fast acceleration setting for servomotor - 20ms to full speed
How well it works when connected to motion software? See this video:
Test on motion software
~
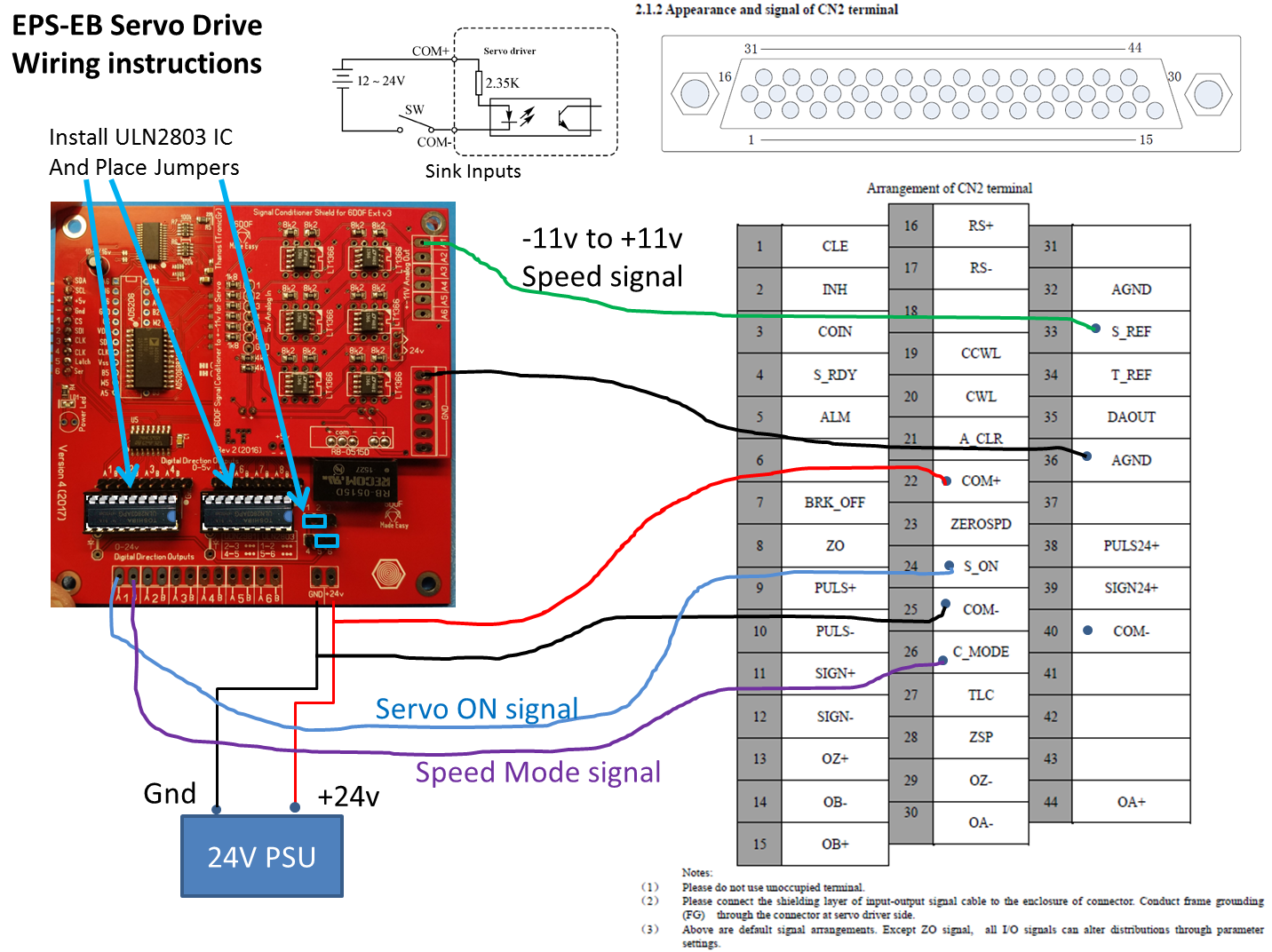
Setting up the Servo drive was easy, only a few parameters needed to be adjusted in its operation panel. One setting that enables external commands on the CN2 connector, one to set the servo in analog input speed mode, one setting to enable the external CWL and CCWL limit inputs, and last set the acceleration ramp up/down timing to 20ms (can be lower but 20ms gives a good space for safe braking). Extra settings I'll be using is the automatic enable of the external electromagnetic brake when the motor is in zero speed to hold position without the load back-driving it down.

Simplified representation of the position control loop


The wiring before the CN2 connector however might look a little intimidating, but its not so bad. The AMC1280USB provides only 3 outputs, Analog speed control (-11v to +11v using the Signal Conditioner), Sink output Servo Enable signal and Zero Speed signal to completely stop the motors when the "Kill motors" emergency switch is pressed.
This is a different servo example that uses C-mode to select analog input

Generic schematic of connections between servomotor and the AMC1280USB controller
The Encoder2Position module however has lots of connection to the CN2 connector like the four connections to the Differential Encoder Outputs and two more Sink outputs that connect to the CWL and CCWL (Forward or Backward rotation prohibited inputs of the CN2). Also the Encoder2Position encoder is interfaced to the two magnetic reed limit switches that needed for the automatic calibration of the actuator during power up. The sink inputs are reversed logic that means they need to be HIGH to detect that the limit switch was activated.


Simplified schematic of the Encoder2Position inputs-outputs
The R1 potentiometer checks and sets the calibration speed once on power up.

The Encoder2Position module features a STM32 F1 processor running at 72Mhz, allowing capture of the fast quadrature encoder pulses, and handles automatically the limit switches of the actuator so you don't have to worry for much except just use the 12-bit analog position signal it outputs (0-5v). On the current linear servomotor I have it measures about 30000 positions for the 200mm stroke, and with the actuator having 500mm/s speed, it means it can capture about 60000 pulses in 500ms time with no problem,
The Encoder2Position module will be available soon on Tindie as soon I finalize the firmware on the test unit. Working on getting the 12-bit (or 16bit) SSI output faster without blocking the quadrature encoder counter interrupts.
For often updates you can subscribe to my YouTube channel:
https://www.youtube.com/user/tronicgr
You could also contact me by email, although you may have to wait sometimes for days for reply (depending on my spare time and the backlog of messages). If you keep it short to one or two questions I might be able to answer right away:

Thanks
Thanos
San Diego, California 2018
~
Update 2/19/2019:
I have made a better compact solution for generic servo drives that avoids having the wiring mess described on this post above. The AMC-HS runs very similar firmware as AMC1280USB, but is supports only 10-bit Analog Input and 9-bit Analog speed Output. Hardware wise the AMC-HS includes the Encoder2position and +11,to,-11v Servo signal circuitry in form of servo cards that plug on the main board. Everything plugs together clean and breaks out all the signals for each servo drive on 25pin connectors. Building the wiring between the AMC-HS and the servo drive can be a little nightmare as each control cable has 12 wires from which 6 has to be shielded and twisted kind. Plus each actuator has to be fitted with limit switches. The AMC-HS was designed for the Syntron HS drives, but it can control other brand similar servo drives in the market that have Speed control and breakout the servomotor encoder signals. In that case you need just different pin-out on the control cables.
See these videos:
Newer Motion controller solution is also available for plug and play operation with specific servomotor drive with higher resolution 4096 positions and low 2ms latency:
https://www.youtube.com/watch?v=DcjdBhKvPNw
https://www.youtube.com/watch?v=blJr39yJCiY
https://www.youtube.com/watch?v=0rglXxBNY38
Hello,how to use hexpod 6dof ? i jusd add dll file to plugin folder,but i dont know how to start it
ReplyDeletethank you
Hi Thanos, I'm looking at doing a DC version. Do you have, or are able do make, a wiring diagram like above but for a DC linear servo?
ReplyDeleteI'm not sure which model DC servo you are referring to. If you gave me some more information I could help with it.
Delete