Hi to all,
I decided I should start making available my AMC644USB board that I designed and build in a small volume back in 2011 (2-1-2011). I had them build but didn't had enough parts for a kit back then. Along that some setbacks left it hanging for a while. Now I have new firmware for it that supports all the the basic functions I wanted. And with the feedback from whoever want the boards I could make even more perfect! I have about 15 boards now and if there is enough interest I'll make more.
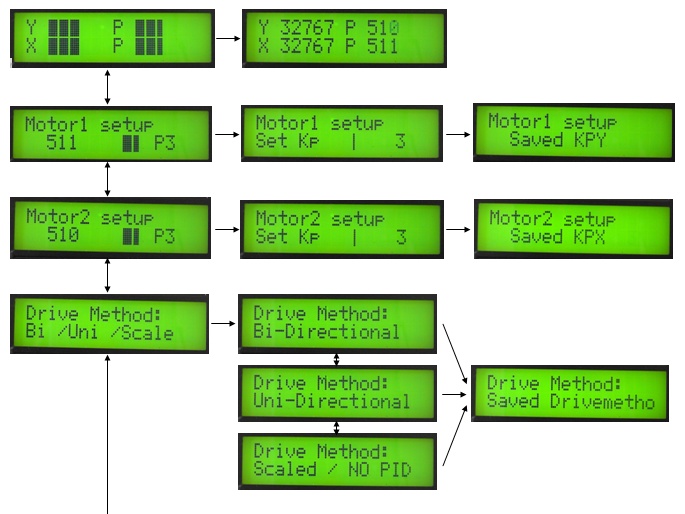
This board has some features on it that are missing from the AMC1.6 that I designed this year. It has support for driving AC motor drives providing them with 10v analog signal for speed and in addition with an inexpensive darlington array it can provide 24v for the direction signals. Also it has onboard contact encoder and two buttons (one provided by the encoder itself) to implement a simple to use realtime state machine menu.
In more details:
1. The USB FTDI breakout board provides 5v power to the AMC644USB board along with serial interface at speeds of 115kbps.
2. The refresh rates for the new position data is now 1ms (0.001 second), so it can recalculate and reposition the motors 1000 times per second.
3. The LCD is powered from the AMC644USB board now. No need for extra power.
4. The Analog out circuit (for 0-10v) is powered from an onboard DC-DC stepup converter also powered from the USB power.
5. The PWM signal for the motors is running at 21kHz with 10-bit resolution.
6. The analog inputs (for potentiometers) are also 10-bit resolution.
7. The motor position quadrature optical encoders are connected to the ADC ports (interrupt capture input) and can count more than 131070 pulses per second (I could not make my test motor turn faster to see the limits yet). And end positions for the encoder will be determined using limit switches (on the rest ADC ports).
In the software side, It handles now 16-bit values for each of the two axis meaning the motor now can have 65535 positions if quadrature optical encoder is used for position feedback. Also the calculations done inside the PID are now Integer type with no rounding. For now I made available Proportional term in the LCD menu settings, but Integral and Derivative will be available as well.
The Atmega644 will be pre-programmed by me with a cool bootloader and the firmware. Then any updates or requested changes can be downloaded to the Atmega644 with a click on the computer side using a nice GUI interface programmer through USB. It does not use the same FTDI USB programmer as the AMC1.6, but a better one.
So far I have two of them fully assembled and ready to go and the rest in parts.
So anyone interested to be part of this project just contact me in my mail:
tronickod@yahoo.com
Thanos